Post sveobuhvatno opisuje osnovni koncept rada istosmjernih motora bez četkica koji se nazivaju i BLDC motori.
Razlika između četkanog i četkanog istosmjernog motora
U našim tradicionalnim četkanim motorima četke se koriste za prebacivanje središnjeg pokretnog rotora u odnosu na okolni stator stalnih magneta.
Četke postaju imperativ jer je rotor izrađen od elektromagneta kojima je potrebna snaga za rad, ali budući da i on treba okretati stvari postaju nespretne, a četke postaju jedina alternativa za napajanje rotirajućeg elektromagnetskog rotora.
Suprotno tome, kod četkarskih istosmjernih motora ili BLDC motora imamo četkicu sa središnjim statorom i okružujući kružni rotor. Stator se sastoji od skupa elektromagneta, dok rotor ima trajne magnete pričvršćene po cijelom obodu na određenim proračunatim položajima.
Korištenje Hall Effect senzora
Mehanizam također ima senzor Hallovog efekta koji je instaliran kako bi se mogao osjetiti položaj rotora i njegovih magneta u odnosu na elektromagnet statora i obavještavati podatke u vanjski sklopni krug koji zatim postaje odgovoran za aktiviranje / deaktiviranje elektromagneta na ispravan slijed ili vrijeme, utječući na rotacijsko kretanje na rotoru.
Gornje objašnjenje može se razumjeti uz pomoć sljedeće osnovne ilustracije, a zatim kroz razrađeni dizajn na sljedećim slikama.

Naučili smo i znamo poprilično zanimljivih stvari o magnetima i načinu interakcije ovih uređaja.
Znamo da sjeverni pol magneta privlači južni pol drugog magneta dok se poput polova odbijaju.
Kako su postavljeni trajni magneti
Na gore prikazanom dijagramu vidimo disk s ugrađenim magnetom na rubu (prikazan crvenom bojom) koji je smješten sjevernim polom okrenutim prema van, a također i elektromagnet postavljen paralelno u blizini kružnog ruba diska koji stvara južno magnetsko polje kad je pod naponom.
Pretpostavimo sada da je raspored postavljen kako je prikazano na prvom gornjem dijagramu s elektromagnetom u deaktiviranom stanju.
U tom položaju čim se elektromagnet aktivira s odgovarajućim istosmjernim ulazom, on postiže i generira južno magnetsko polje utječući na vučnu silu preko magneta diska što zauzvrat prisiljava disk da se okreće s nekim zakretnim momentom dok njegov trajni magnet ne dođe u red s elektromagneti nasuprot linija strujanja.
Gornja akcija prikazuje osnovni format u kojem funkcionira koncept BLDC.
Kako BLDC motor radi sa Hall Effect senzorima
Sada da vidimo kako se zapravo gornji koncept provodi pomoću senzora Hallovih efekata kako bi se održalo kontinuirano kretanje preko rotora.
Sljedeći primjer dijagrama sveobuhvatno objašnjava mehanizam:

Na gornjem dijagramu u osnovi vidimo izravni BLDC raspored rotora / statora, gdje je vanjski kružni element rotirajući rotor, dok središnji elektromagnet postaje fiksni stator.
Rotor se mogao vidjeti s nekoliko stalnih magneta učvršćenih na periferiji koji imaju južni pol kao utjecajne linije toka, središnji je stator snažni elektromagnet koji je dizajniran da generira ekvivalentnu snagu sjevernog pola magnetskog toka kada se napaja s vanjski istosmjerni.
Također možemo vizualizirati Hall senzor koji se nalazi u blizini jednog od uglova periferije unutarnjeg rotora. Hallov efekt u osnovi osjeća magnetsko polje rotirajućeg rotora i dovodi signal u upravljački krug odgovoran za napajanje elektromagneta statora.
U odnosu na gornji položaj vidimo prazno područje (bez bilo kakvog magnetskog polja) rotora u bliskom kontaktu s Hall senzorom koji ga drži u isključenom stanju.
U ovom trenutku signal za isključivanje iz Hallovog efekta obavještava upravljački krug da UKLJUČI elektromagnete, što trenutno izaziva vučni učinak na južni pol rotora koji stoji odmah iza ugla.
Kada se to dogodi, Južni pol se spušta strmoglavo stvarajući potreban moment na rotoru i pokušava se poravnati u skladu sa sjevernim polom elektromagneta.
Međutim, u tom se procesu južni pol rotora također približava senzoru Hall-a (kao što je prikazano na donjem dijagramu) koji to odmah detektira i UKLJUČUJE obavještavajući upravljački krug da isključi elektromagnete.
ISKLJUČENO vrijeme elektromagneta je presudno
Isključivanje elektromagneta u pravom trenutku kako signalizira senzor Hall efekta zabranjuje zaustavljanje i ometanje gibanja rotora, već mu omogućuje da nastavi s kretanjem kroz generirani moment dok se prethodni položaj ne počne oblikovati i dok dvorana senzor još jednom 'opipava' prazno područje rotora i isključuje se ponavljajući ciklus.
Gornje prebacivanje Hall senzora u skladu s različitim položajima rotora uzrokuje kontinuirano rotacijsko gibanje s tokom koji može biti izravno proporcionalan magnetskim interakcijama stator / rotor i naravno pozicioniranjem efekta Hall-a.
Gornje rasprave objašnjavaju najosnovnija dva magneta, jedan mehanizam Hall Hall senzora.
Da bi se postigli izuzetno veći zakretni momenti, više magneta i kompleta elektromagneta koristi se u ostalim motorima bez četkica s većom učinkovitošću, pri čemu se može vidjeti više od jednog senzora Hall efekta za provođenje višestrukog senziranja rotorskih magneta tako da se različiti setovi elektromagneta mogu prebacivati na preferirani točan slijed.
Kako upravljati BLDC motorom
Do sada smo razumjeli osnovni radni koncept BLDC motori i naučili kako se Hall senzor koristi za aktiviranje elektromagneta motora kroz vanjski priključeni elektronički krug za održavanje kontinuiranog rotacijskog gibanja rotora, u sljedećem ćemo odjeljku proučavati ponovno ocjenjivanje kako krug BLDC pogonskog sklopa zapravo radi za upravljanje BLDC motorima
Metoda uvođenja elektromagneta sa fiksnim statorom i rotirajućeg slobodnog magnetskog rotora osigurava poboljšanu učinkovitost BLDC motora u usporedbi s tradicionalnim četkanim motorima koji imaju točno suprotnu topologiju i zbog toga trebaju četke za rad motora. Korištenje četki čini postupke relativno neučinkovitima u smislu dugog vijeka trajanja, potrošnje i veličine.
Nedostatak BLDC motora
Iako su BLDC tipovi možda najučinkovitiji koncept motora, on ima jedan značajan nedostatak što za rad zahtijeva vanjski elektronički sklop. Međutim, s pojavom modernih IC-a i osjetljivih Hall senzora ovo se pitanje sada čini prilično trivijalnim u usporedbi s visokim stupnjem učinkovitosti povezanim s ovim konceptom.
4-magnetni BLDC upravljački program Dizajn
U ovom ćemo članku raspravljati o jednostavnom i osnovnom upravljačkom krugu za četveromagnetski, BLDC motor s jednim dvostrukim senzorom. Rad motora može se razumjeti pozivanjem na sljedeći dijagram mehanizma motora:

Gornja slika prikazuje osnovni BLDC raspored motora koji ima dva seta trajnih magneta preko periferije vanjskog rotora i dva seta središnjeg elektromagneta (A, B, C, D) kao statora.
Da bi pokrenuli i održali rotacijski moment, bilo A, B ili C, D elektromagneti moraju biti u aktiviranom stanju (nikako zajedno), ovisno o položaju sjevernog / južnog pola rotorskog magneta u odnosu na aktivirani elektromagneti.
Kako djeluje BLDC motorni vozač
Da budemo precizni, pretpostavimo položaj prikazan u gornjem scenariju s A i B u uključenom stanju tako da se strana A napaja s južnim polom, dok se strana B napaja sa sjevernim polom.
To bi značilo da bi strana A vršila vučni efekt preko svog lijevog plavog sjevernog pola i odbijajući efekt na svom desnom bočnom južnom polu statora, slično bi strana B povlačila donji crveni južni pol i odbijala gornji sjeverni pol rotora .... tada bi se moglo pretpostaviti da čitav postupak vrši impresivno kretanje u smjeru kazaljke na satu nad mehanizmom rotora.
Pretpostavimo također da je u gornjoj situaciji Hall-ov senzor u deaktiviranom stanju, jer može biti 'Hall-aktivirani' Hallov senzorski uređaj.
Gornji efekt pokušao bi poravnati i prisiliti rotor tako da se jug zaključa licem u lice sa stranom B, dok se sjeverni pol sa stranom A, međutim prije nego što ova situacija uspije provesti Hall senzor se dovede u neposrednoj blizini pomicanjem gornjeg južnog pola rotora, a kada ovaj samo prijeđe preko Hallovog senzora, prisiljen je uključiti se, šaljući pozitivan signal na povezani upravljački krug koji trenutno reagira i ISKLJUČUJE elektromagnete A / B i uključuje elektromagnete C / D, vodeći računa da se moment rotora u smjeru kazaljke na satu ponovno uspostavi, održavajući konstantan okretni moment na rotoru.
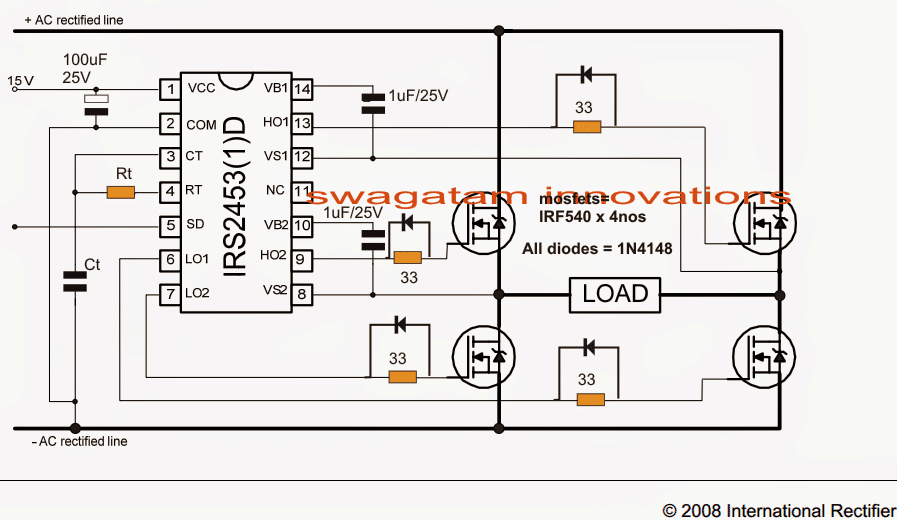
Osnovni BLDC upravljački krug
Gore objašnjeno prebacivanje elektromagneta kao odgovor na okidački signal Hallovog senzora može se vrlo jednostavno implementirati pomoću sljedeće izravne ideje BLDC upravljačkog kruga.

Sklop ne treba puno objašnjenja, jer je previše osnovni, tijekom situacija UKLJ. Hall senzora, BC547 i spojeni TIP122 odgovarajuće su UKLJUČENI, što pak UKLJUČUJE odgovarajuće setove elektromagneta pričvršćenih preko kolektora i pozitivne , tijekom razdoblja ISKLJUČENJA Hall-ovog senzora, BC547 / TIP122 par je ISKLJUČEN, ali krajnji lijevi TIP122 tranzistor je UKLJUČEN aktivirajući suprotne setove elektromagneta.
Situacija se mijenja naizmjenično, neprekidno sve dok ostaje primijenjena snaga održavajući BLDC rotirajućim potrebnim momentima i momentom.
Prethodno: Krug punjača za laptop iz 12V baterije Dalje: Kako napraviti snažni krug ometača RF signala